|
I am a PhD student in the Robotics Institute at Carnegie Mellon University (CMU), advised by Prof. Andrea Bajcsy. My research focuses on developing uncertainty-aware robotic systems that ensure safety and robustness in complex, open-world environments. I study the theoretical foundations and algorithms for quantifying uncertainty in learning-based robotic systems and leverage control-theoretic and information-theoretic principles to mitigate it. Before joining CMU, I was a research officer at the Defense AI Center of the Agency for Defense Development (ADD), where I researched uncertainty-aware navigation in complex and unknown environments. I completed my bachelor's degree (Summa Cum Laude) in Computer Science and Engineering at the Seoul National University (SNU). |

|
|
|

|
* indicates equal contribution |
|
ICRA
|
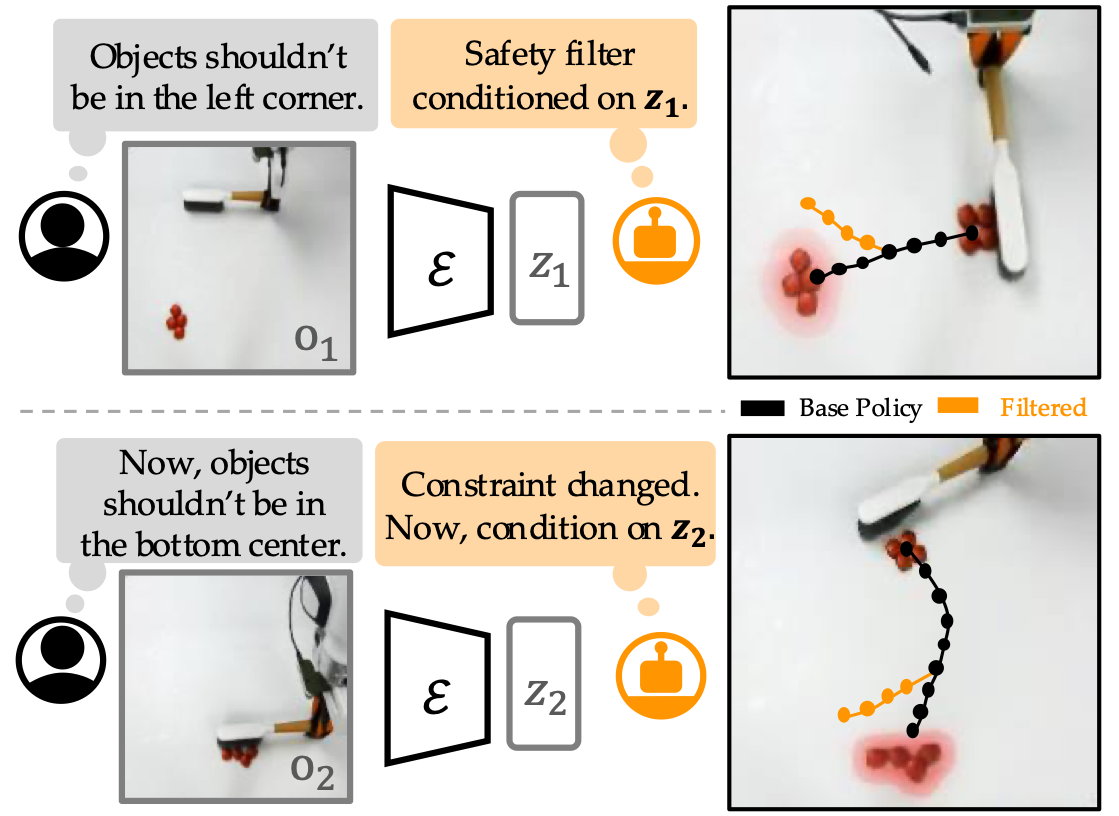
Sankalp Agrawal*, Junwon Seo*, Kensuke Nakamura, Ran Tian, Andrea Bajcsy IEEE International Conference on Robotics and Automation (ICRA), 2026 paper website Constraint-parameterized latent safety filters that can adapt to user-specified safety constraints at runtime. |
|
RA-L
|
Junyoung Kim, Minsik Jeon, Jihong Min, Kiho Kwak, Junwon Seo IEEE Robotics and Automation Letters (RA-L), 2026 paper website Evidential Ellipsoidal Bayesian Kernel Inference for uncertainty-aware continuous 3D semantic mapping. |
|
CoRL
|
Junwon Seo, Kensuke Nakamura, Andrea Bajcsy Conference on Robot Learning (CoRL), 2025 paper website video Uncertainty-aware latent safety filters that unify reachability analysis in a latent world model with OOD detection to prevent both known and unseen safety hazards. |
|
WACV
|
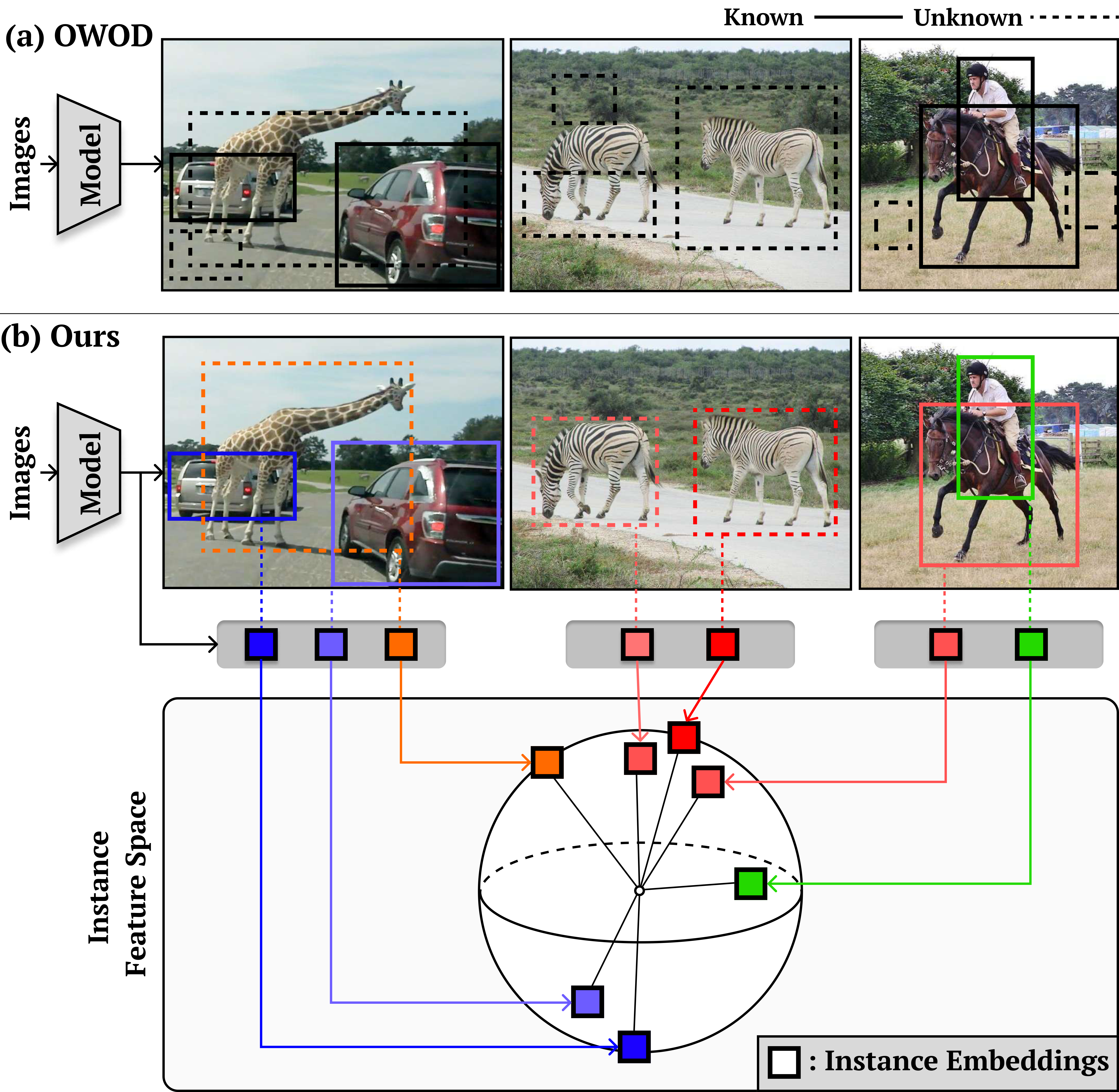
Sunoh Lee*, Minsik Jeon*, Jihong Min, Junwon Seo IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2026 paper website Open World Object Detection framework that jointly detects unknown objects and learns instance embeddings. |
|
IROS
|
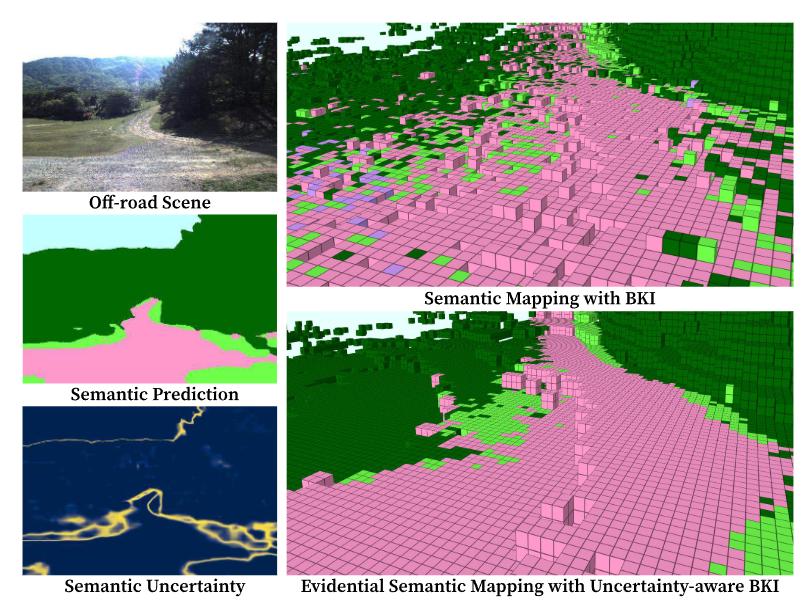
Junyoung Kim*, Junwon Seo*, Jihong Min IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 (Best Cognitive Paper Finalist) paper website video Uncertainty-aware semantic BKI mapping framework for robust deployments in off-road environments using Evidential Deep Learning. |
|
IROS

|
Junwon Seo, Taekyung Kim, Seongyong Ahn, Kiho Kwak IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 paper video Meta-learning framework for learning a global model that accurately predicts off-road terrain traversability. |
|
IV
|
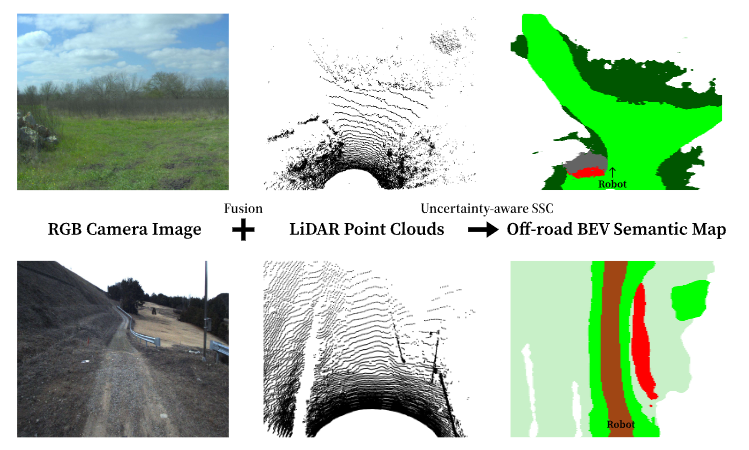
Ohn Kim*, Junwon Seo*, Seongyong Ahn, Chong Hui Kim IEEE Intelligent Vehicles Symposium (IV), 2024 paper UFO: Uncertainty-aware LiDAR-image Fusion for Off-road Semantic Terrain Map Estimation. |
|
ICRA

|
Minsik Jeon*, Junwon Seo*, Jihong Min IEEE International Conference on Robotics and Automation (ICRA), 2024 paper video Unsupervised domain adaptation for robust object detection in real-world adverse weather conditions. |
|
RSS
|
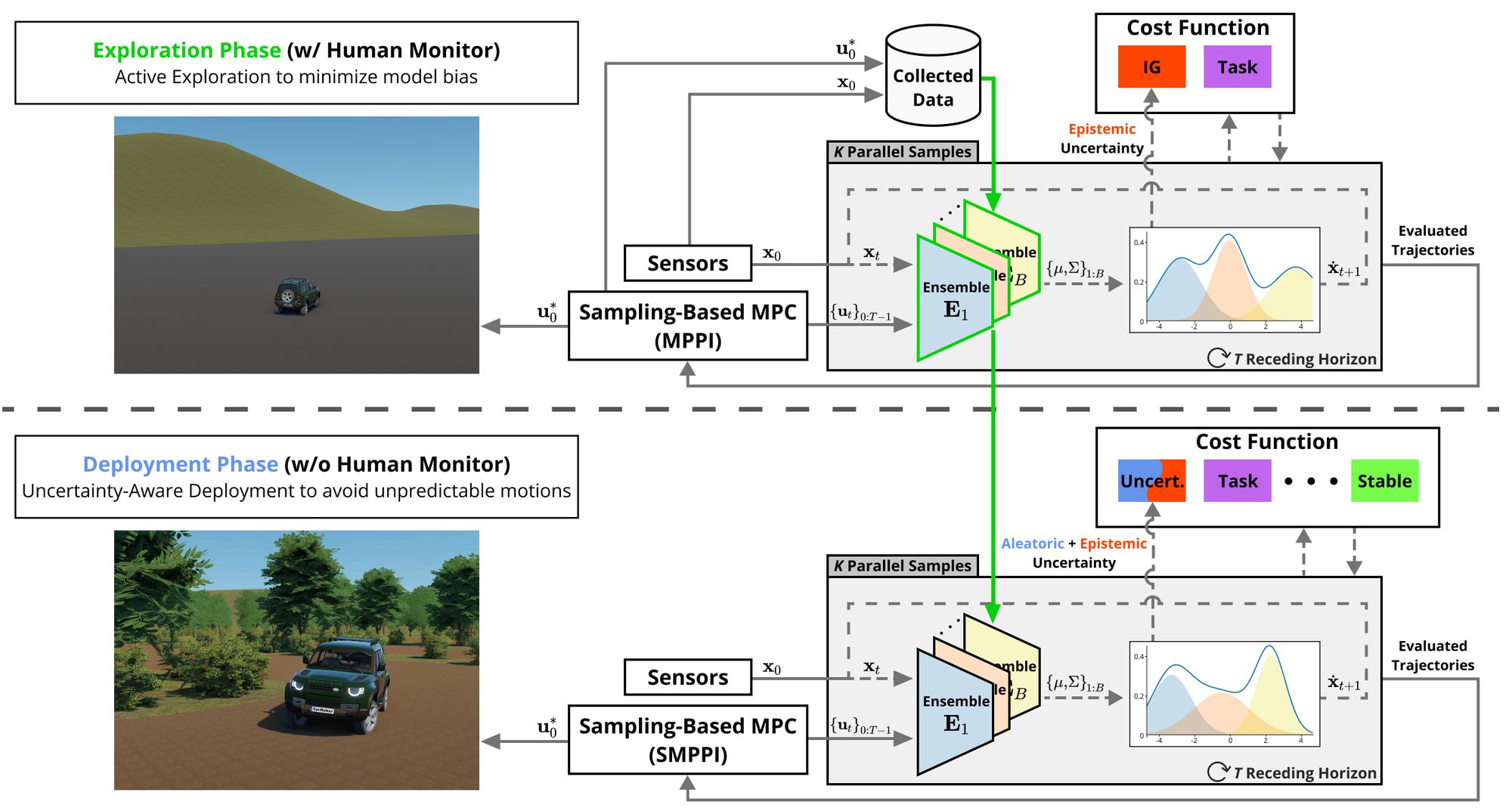
Taekyung Kim*, Jungwi Mun*, Junwon Seo, Beomsu Kim, Seongil Hong Robotics: Science and Systems (RSS), 2023 paper website video Active exploration for learning vehicle dynamics model and uncertainty-aware deployment. |
|
RA-L
|
Junwon Seo, Sungdae Sim, Inwook Shim IEEE Robotics and Automation Letters (RA-L), 2023 paper video Visual terrain traversability learning in off-road that utilizes only self-supervision without human annotations. |
|
RA-L
|
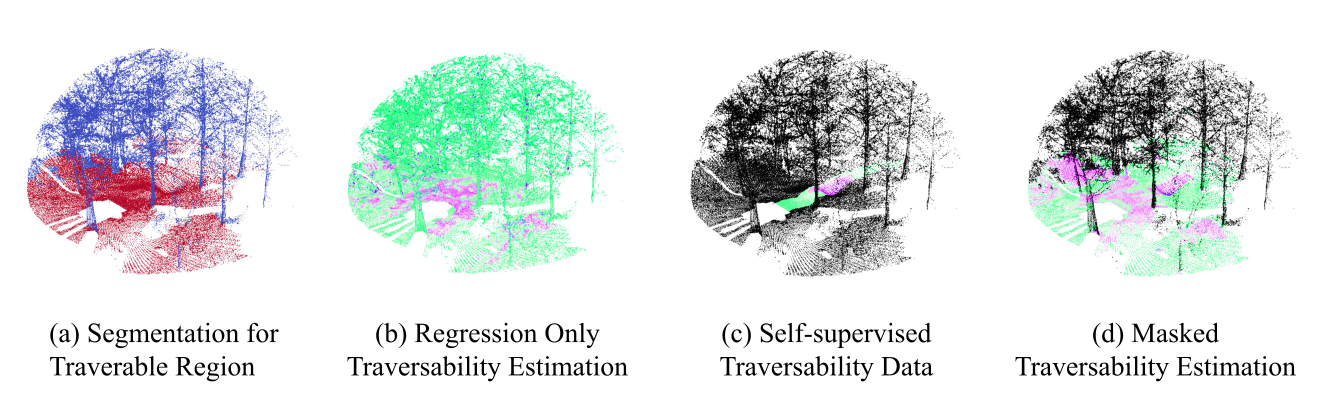
Junwon Seo*, Taekyung Kim*, Kiho Kwak, Jihong Min, Inwook Shim IEEE Robotics and Automation Letters (RA-L), 2023 paper video presentation LiDAR-based self-supervised traversability estimation framework that can be easily scalable to various vehicles and sensor types. |
|
Jihwan Bae*, Junwon Seo*, Taekyung Kim, Hae-gon Jeon, Kiho Kwak, Inwook Shim IEEE Access, 2023 paper Handling uncertainty problems in self-supervised traversability estimation with metric learning. |
|
|
|
Agency for Defense Development, 2021 - 2024 Perception and control algorithms for off-road navigation: learning-based traversability cost map, semantic terrain classification map, moving object detection and tracking, and vehicle dynamics learning. |
||

|
Agency for Defense Development, 2021 - 2022 Built an autonomous driving dataset with multi-spectral images and LiDAR in adverse weather conditions and developed a robust traversable area detection and object detection algorithm. |
||

|
Agency for Defense Development, 2021 - 2022 Developed a learning-based traversability map for autonomous robotic exploration under subterranean environments. |
||
|
Morpheus 3D, 2020 The light stage system and face normal map reconstruction algorithm for 3D face reconstruction with high fidelity. |
||

|
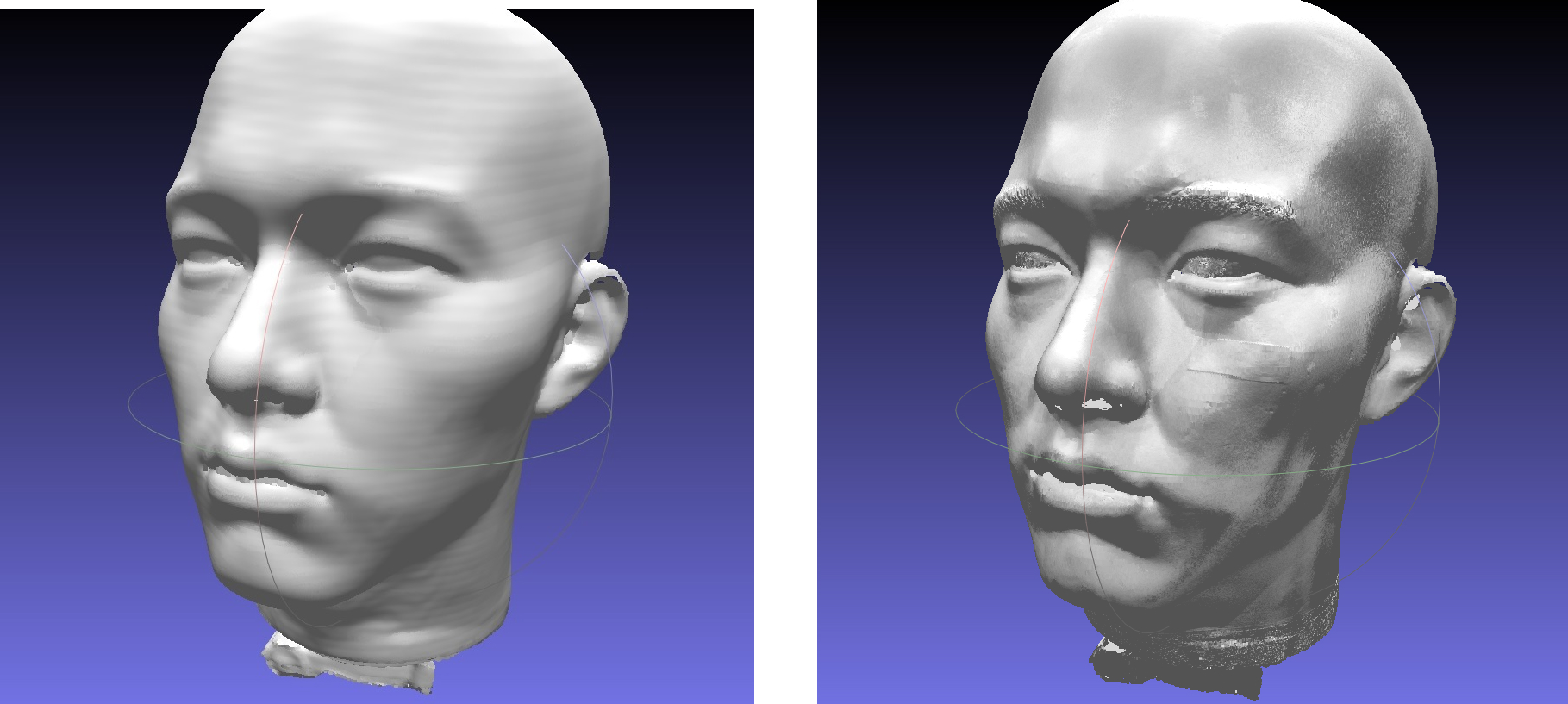
Morpheus 3D, 2019 - 2020 A Structured-light 3D scanner for high-quality hair and face geometry reconstruction. |
|
Website template adapted from Jon Barron's website |